Engineering & Research
I have a mechanical engineering background from both my undergraduate studies at Purdue (ME’15) and my master’s degree at Columbia (SEAS’18), with a focus on robotics research and design.
Series Elastic Actuators (SEA) Design for Humanoid Robot
Publication:
[IMECE2014-38758] Z. Shen, J. Zhang, M. Anand, J. Schwartzentruber, and J. Seipel, “Design of Elastic Element and Controller Algorithm,” in Proc. ASME Int. Mech. Eng. Congr. Expo. (IMECE), Montreal, Canada, 2014, Paper No. V003T03A057.
Intro
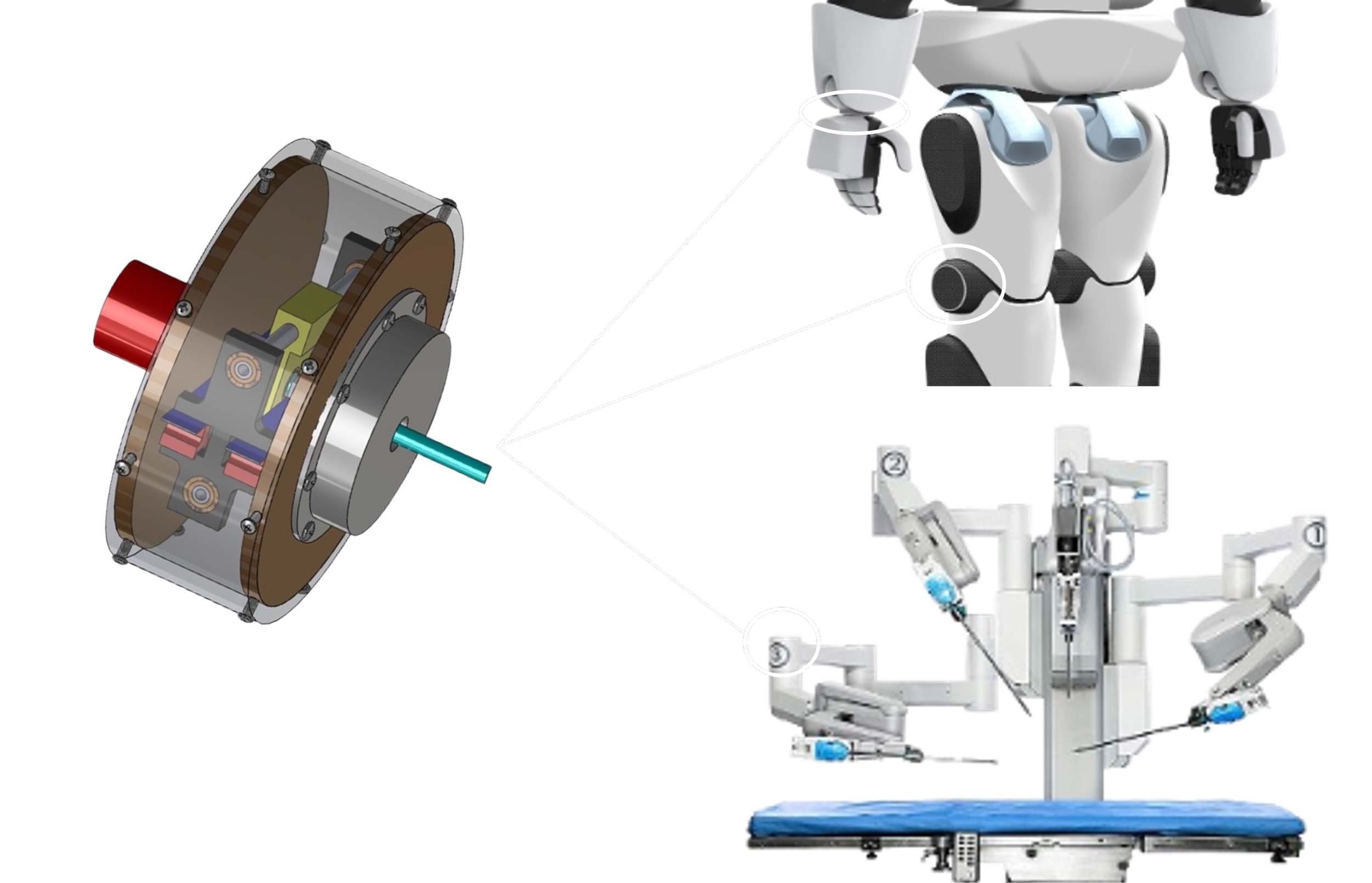
Series Elastic Actuators (SEAs) are essential components in humanoid robots for mimicking muscle-like movement and achieving accurate force control. Unlike traditional rigid joints, SEAs allow for more natural and human-like motion without sacrificing precision. In this research, we developed a novel series elastic element that is low-cost, easy to fabricate, and adjustable stiffness with high accuracy. Our goal was to design a solution that not only improves mechanical performance but is also practical for broader use in humanoid robotic systems.

Work
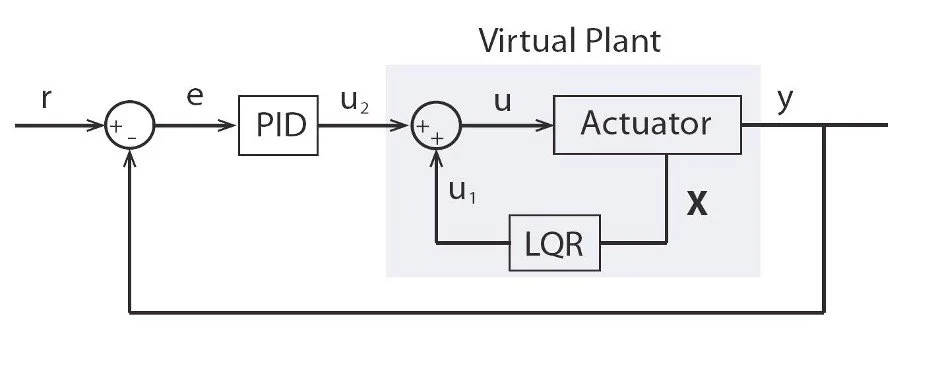
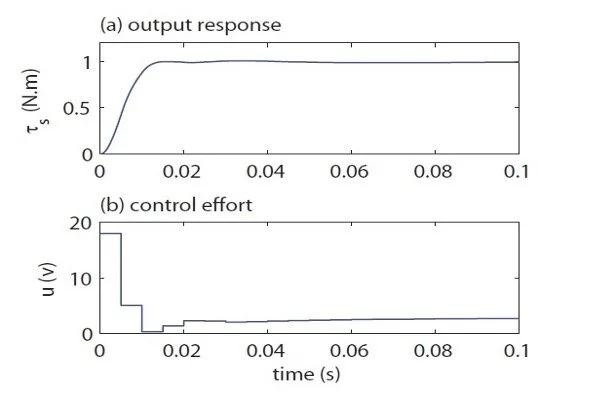
Designed a tunable SEA prototype that achieved over R² > 0.99 accuracy in torque control, while reducing manufacturing cost to 1/40 of comparable commercial solutions
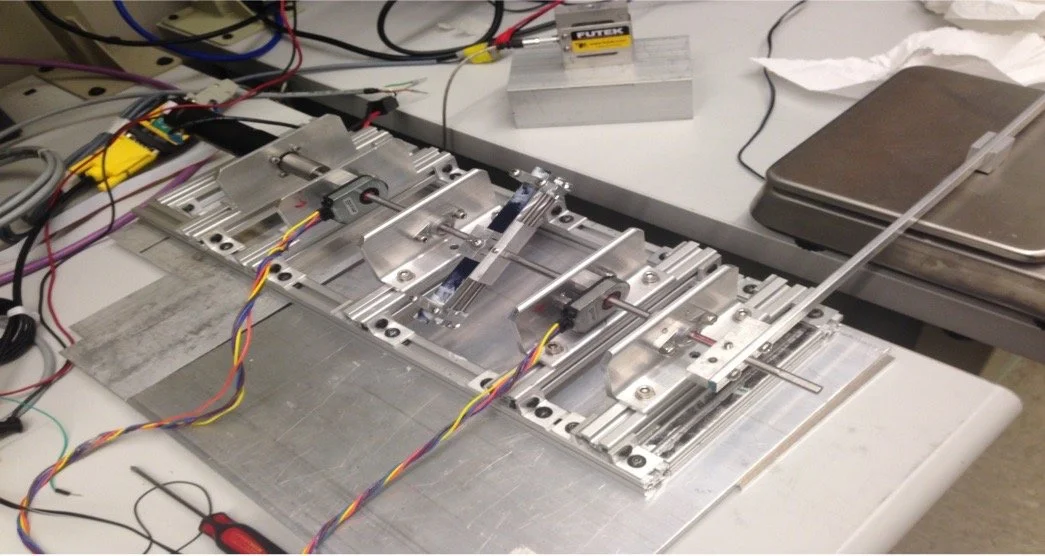
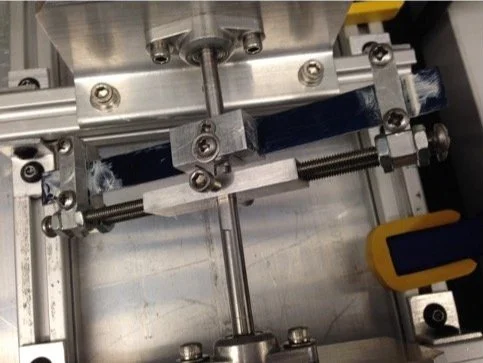
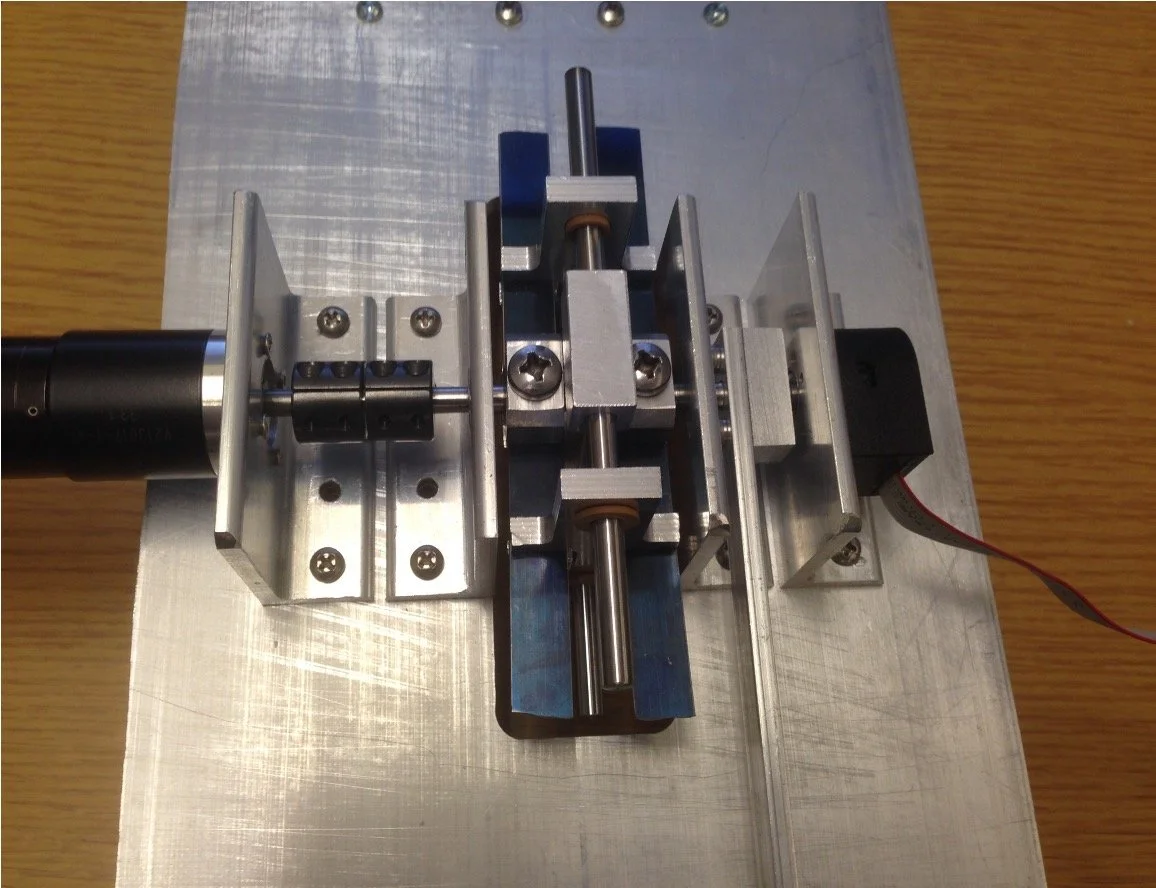
Redesigned the testing system to reduce hysteresis by a factor of 20, using CATIA for CAD and machining with lathe tools
Upgraded previous robot structures using SolidWorks, incorporating new components machined via 3D printing and traditional methods
Designed and fabricated key components for a 4-point torque testing platform, ensuring structural precision and system integration
Calibrated and fine-tuned the elastic platform for accurate torque control through hands-on testing and data analysis
Collected and analyzed data on deflection angles and torque output, establishing a reliable correlation model between the two
Improved the original actuator design by reducing its length by 90% through a dual-elastic-element system, while maintaining comparable reliability and cost-efficiency
Basketball Shooting Form Correction Sleeve

Intro
Ball is life for me, and I’ve combined that passion with my engineering skills to create a wearable shooting sleeve that helps basketball players correct their form and improve shooting accuracy.
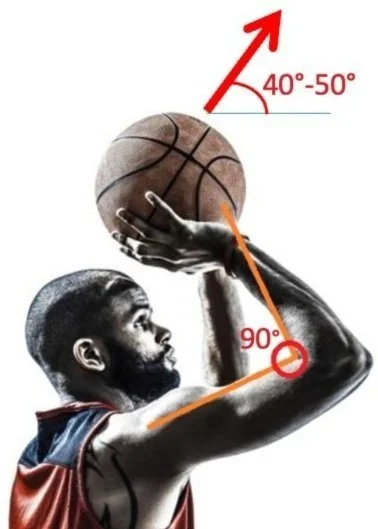
I was fortunate to learn key shooting principles from a player who had trained with Stephen Curry. Whether it’s a one-motion release like Curry’s or a two-motion shot like Ray Allen’s, elite shooters all rely on the same core mechanics. The shooting angle, elbow angle, and the alignment of the wrist, elbow, and shoulder must stay in the same vertical plane. Building on these insights, along with data from Curry’s shooting form, a few friends and I developed a sensor-embedded sleeve that helps players train more effectively and refine their shot on the court.

Work
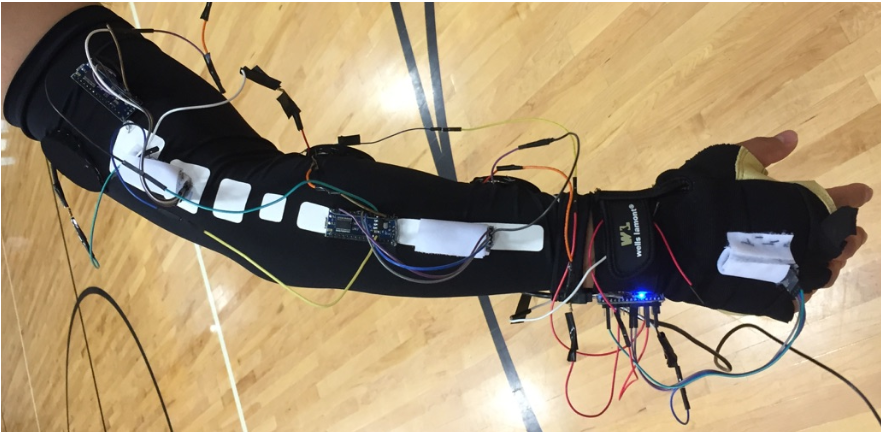
Developed the hardware and sleeve using 9-degree motion sensors and microchip to capture arm, wrist and shoulder movement
Built signal-processing algorithms in MATLAB and Python to detect and analyze form
Collaborated with multiple basketball players to refine function and hardware usability
Evaluated the prototype with five professional players and successfully achieved core functionality
Robotic Fish
Intro
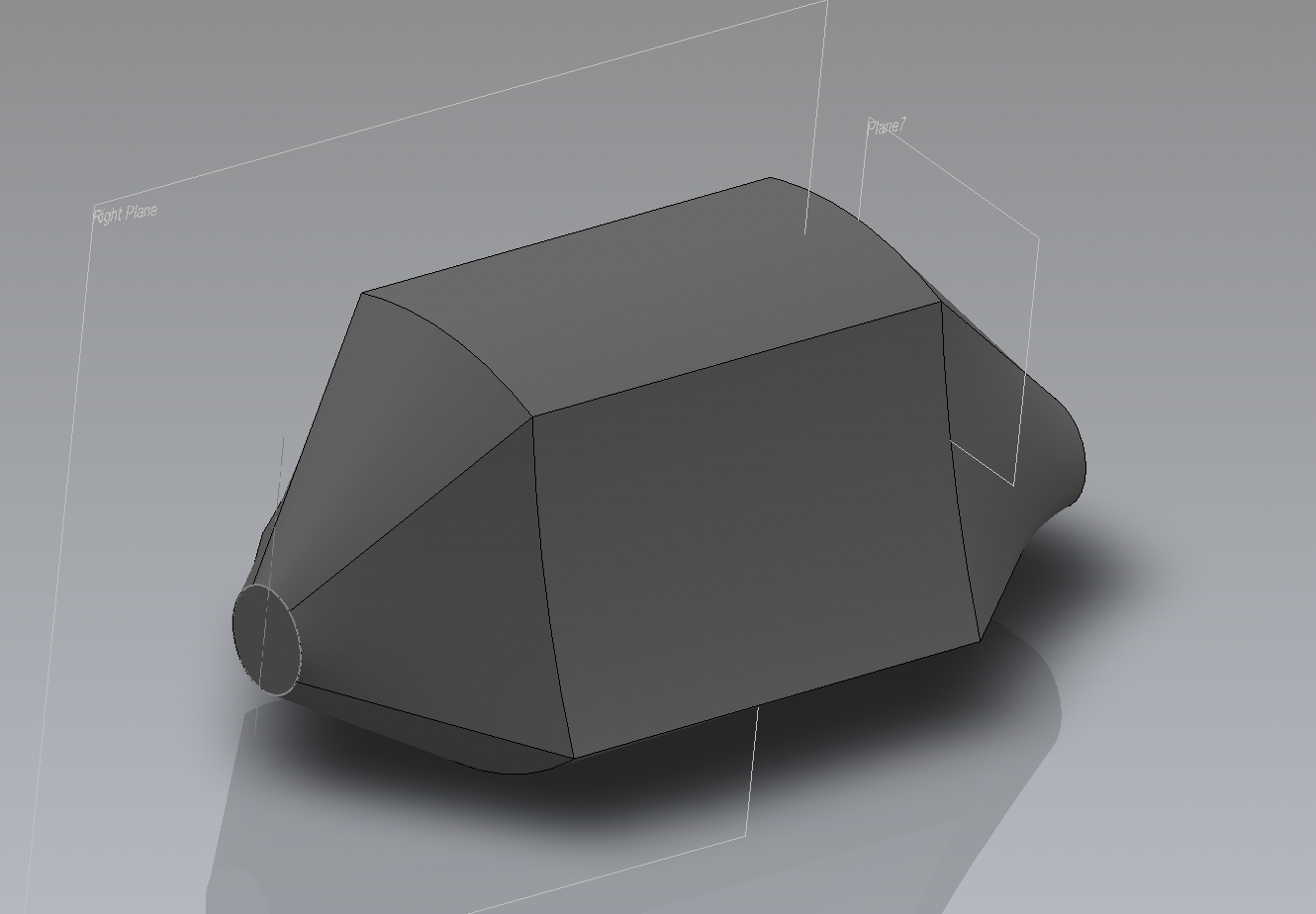
The mission behind designing the robotic fish was to mimic an Asian carp, with the goal of tracking and monitoring this invasive species to help prevent potential overpopulation and disruption of the Great Lakes ecosystem.

Work
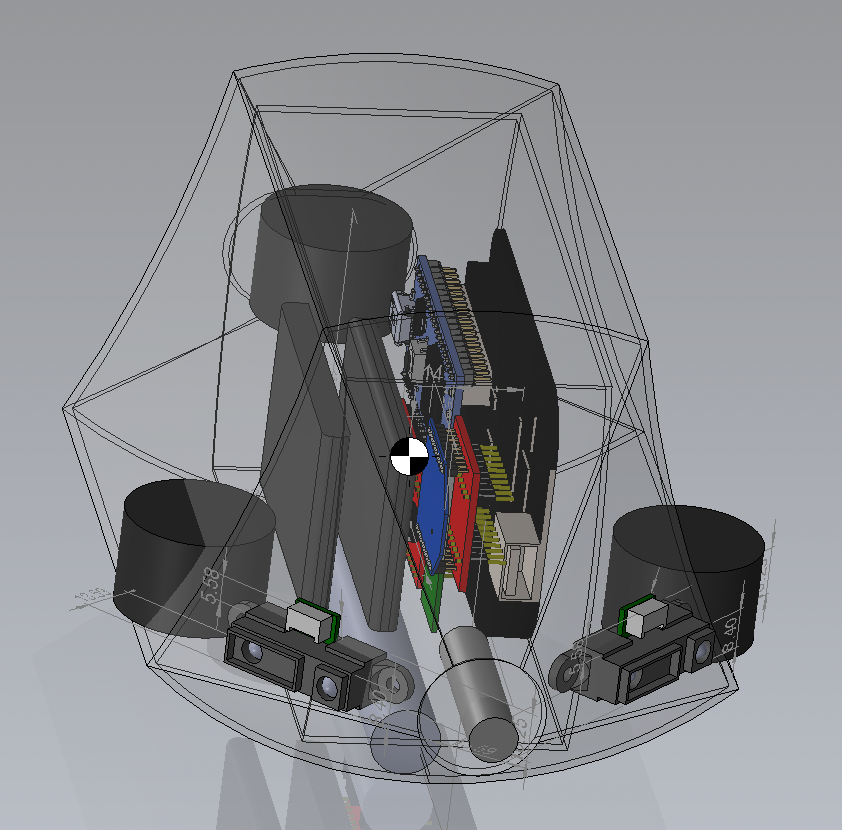
Designed, CAD, and fabricated the shell and internal mechanical components of the robotic fish
Collected and processed underwater acoustic signals using hydrophones
Developed fish-like fin and tail mechanisms using shape memory alloy (SMA) to mimic muscle movement with precise temperature control for actuation
Tested, analyzed, and processed control signals using Arduino and BeagleBone platforms